
KA-08模块为一款采用60 GHz毫米波雷达技术,实现人体生物感知的雷达探测模块。该模块能够输出被测人员的呼吸信息,同时能够长时间采集被测者的睡眠状态,形成人员的睡眠报告。
雷达天线发射电磁波信号,并同步接收目标反射后的回波信号,雷达处理器通过解析不同接收天线回波信号的波形参量之间的相位差和能量变化,反馈目标运动信息。
在雷达检测范围内,当人保持静止不动的状态下,呼吸引起的胸腔起伏等微小运动,都能被雷达检测到,雷达对信号进行分析及统计,进而输出人员每分钟呼吸数值。
1.3.2 有无人检测功能
在雷达检测范围内,雷达可以感知被测目标的微弱运动,从而进行特定场景下有无人状态的判断。
1.3.3 体动检测功能
雷达通过感知目标的卧床情况,进行睡眠状态判断,并输出整夜的睡眠报告结果。
睡眠不佳者场景:用于对呼吸暂停患者、失眠患者、口呼吸患者等的睡眠监测。
老人应用场景:老人在离床监测、睡眠质量监测等。
呼吸慢病患者场景:夜间呼吸监测,生命体征异常告警等。
居家场景:关注自身睡眠健康人群的长期自我监测 。
全屋智能与智能家居产品集成。
该模组提供焊接排针和未焊接排针两种形式,焊接排针时,整体模组尺寸为34.5 * 35 * 11 mm,未焊接排针时,模组尺寸为34.5 * 35 * 8 mm。模组固定孔孔径为2 mm,模组结构示意图如图1所示:
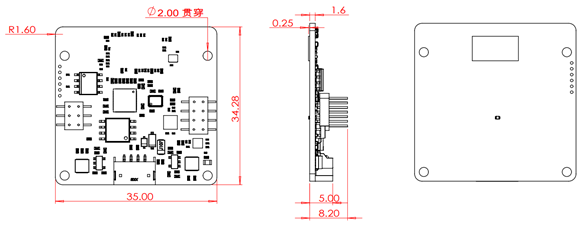
图 1:模组结构示意图
模组同时提供公型插针连接器和排针作为接口,对应引脚名称及说明如表1所示。
表1:模组对应引脚及说明
|
引脚名称 |
典型值 |
说明 |
|
5V |
5V |
电源输入正端 |
|
TX |
3.3V/0V |
串口发送 |
|
RX |
3.3V/0V |
串口接收 |
|
GND |
|
地 |
|
NC |
|
常开端 |
有无人状态
生命体征参数(实时呼吸率)
是否有大体动
整夜睡眠报告,包括:睡眠评分,睡眠分期状态(清醒/REM/浅睡/深睡),呼吸健康度状况(呼吸暂停次数与时长),整夜呼吸率,HRV参数等
硬件版本
本雷达模块为采用毫米波雷达技术,实现人体生物感知以及人体呼吸探测的雷达探测模块。通过对人员运动的多普勒参数及人员的生理参数同步感知技术,实现特定场景下人员状态的无线感知。该模块具有以下几个特点:
Ø 60 GHz毫米波雷达传感器;
Ø 基于 FMCW 调频连续波信号实现雷达探测
Ø 天线FOV:水平向100度,垂直向100度;
Ø 不受温度、湿度、声音、尘埃、光照等影响,适合较恶劣环境;
Ø 可实现有无人探测及呼吸心跳速率监测;
Ø 可提供体动指标报告
Ø 最大探测距离1.5 m,仅支持一人检测;
Ø 通用UART通信接口,提供通信协议;
|
工作参数 |
最小值 |
典型值 |
最大值 |
单位 |
|
工作电压(VCC) |
4.5 |
5 |
5.5 |
V |
|
工作电流(ICC) |
60 |
150 |
200 |
mA |
|
工作温度(Top) |
-40 |
25 |
60 |
°C |
|
存储温度(Tst) |
-40 |
25 |
125 |
°C |
|
发射参数 |
最小值 |
典型值 |
最大值 |
单位 |
|
工作频率(f) |
58 |
/ |
62 |
GHz |
|
发射功率(Pout) |
- |
/ |
8 |
dBm |
|
天线增益 |
|
4 |
|
dBi |
|
FOV |
-50 |
|
+50 |
° |
模组提供1.5 mm 1×4公型插针连接器作为接口,公型插针连接器对应端口型号为HC-ZH-4PWT,可用ZH1.5 mm 1×4 线和模组相连,对应连线和引脚如图2、3所示,模组引脚从左到右依次为GND,RX,TX,5V。TX,RX用于和主控的串口进行通信
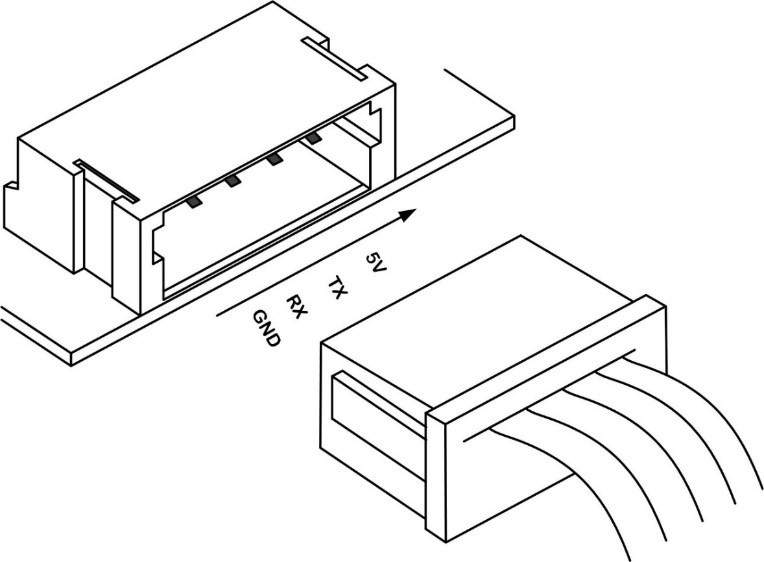
图2:接口3D示意图
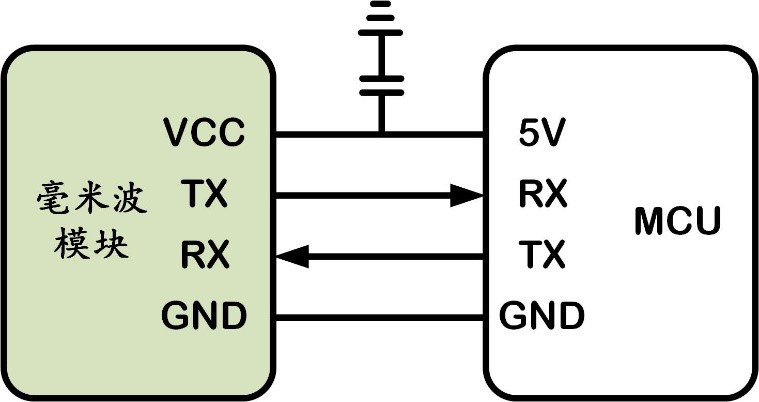
图3:雷达模块与外设连接示意图
同时雷达模组提供排针的连接形式,排针针脚间距为2 mm,相关位置尺寸规格已在雷达模组底视图中以虚线形式标出。对应引脚含义如图4所示:
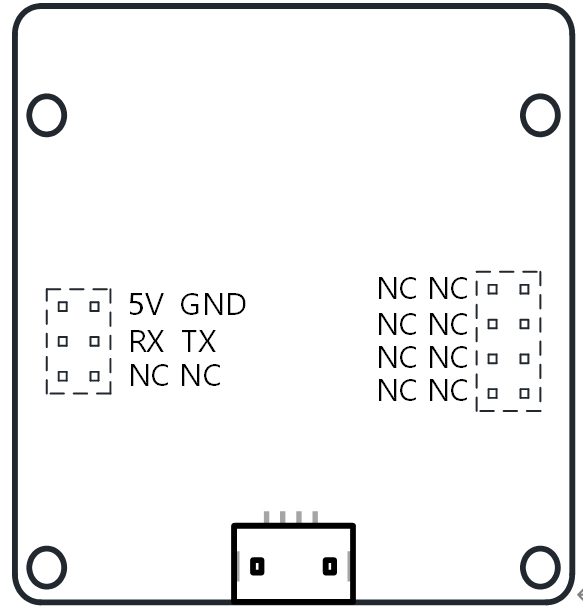
图4:排针引脚名称示意图
雷达模块波束覆盖范围如图 5 所示。雷达覆盖范围大约为一个水平 50°、俯仰 50°的立体扇形区域。
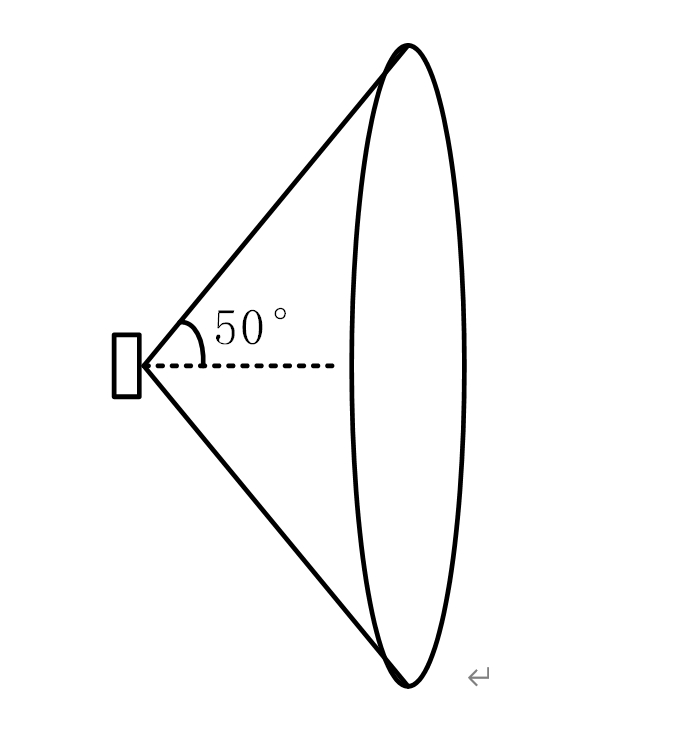
图 5 雷达波束覆盖范围示意图
受雷达波束特性影响,雷达在天线面法线方向作用距离比较远,但是偏离天线法线方向作用距离会变短。 当雷达倾斜安装时,受雷达波束范围及有效辐射空间影响,雷达作用范围会减小,需要在使用时注意。
本模块主要功能包括有:
6.2.1生命体征监测功能
Ø 可监测被测者的生命体征状态,输出相关体征信息,包括呼吸率、心率、焦虑指数等指标。
Ø 探测距离≤1.5m。
6.2.2 存在感知功能
Ø 可监测特定环境下的人员状态,输出有无人信息。
Ø 探测距离≤1.5m。
6.2.3 翻身体动功能
Ø 可监测特定环境下的人员状态,输出人员体动信息。
Ø 探测距离≤1.5m。
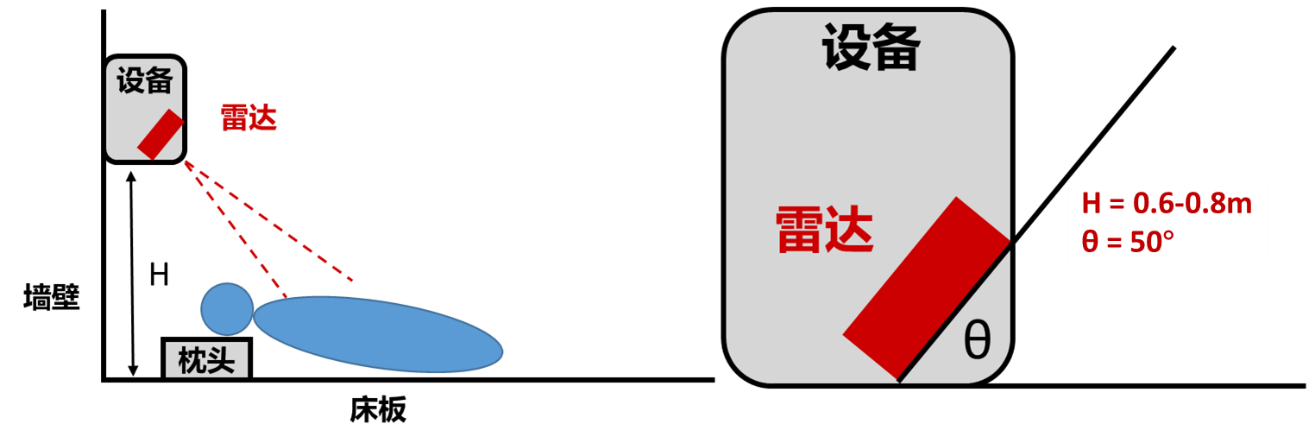
模组推荐安装方式,H为雷达距离床板的高度,θ为雷达与水平向的夹角。考虑到客户实际使用场景,本产品安装在使用者床头的墙壁上,斜指向目标的胸腔。且在实际使用中,须保持雷达与胸腔的位置在0.8-1.5 m范围内,且须让胸腔位于雷达的天线探测范围内。(参考值:雷达高度H为0.6-0.8 m,θ大小为50°)。
注:在安装过程中,请尽可能保持雷达模组天线面法向正朝向胸腔。在模组工作时,模组表面需保证没有金属覆盖。对应人体探测,不同体位可能影响雷达作用距离,雷达不保证所有状态均能达到测量高准确度。
工作模式下,雷达周期性给出当前雷达探测区域内人员存在性状态以及运动状态,主要包括:
Ø 无人状态;
Ø 有人状态;
Ø 有人状态下的呼吸率、心率数值;
当上位机向模组请求记录睡眠之后,模组在记录完成一晚睡眠数据时,将给出以下数据:
Ø 上床时间及下床时间;
Ø 入睡时间及醒来时间;
Ø 离床次数;
Ø 睡眠时长及清醒时长;
Ø 浅睡时长及深睡时长;
Ø 总共呼吸暂停次数、最长呼吸暂停时长、呼吸暂停平均时长;
Ø 睡眠分数、呼吸健康分数、HRV分数;
Ø 睡眠分期数据。
由于本产品在初始上电工作时,需要对内部电路完全复位,才能保证产品正常工作。因此产品初始上电工作时,需要开机稳定时间≥60 s,才能保证后续输出参数的有效性。由于呼吸心率属于弱反射信号,雷达信号处理当中需要一段时间数据积累,在累计过程当中有诸多因素影响雷达处理结果,因此偶发性的探测失效是正常现象。
雷达的探测距离与目标RCS、环境因素关联较大,有效探测距离可能随着环境及目标改变而变化,随着被测者年龄、体型的不同,因此有效探测距离在一定范围波动属于正常现象。
雷达模块对电源品质的要求,高于常规低频电路。在对模块供电时,要求电源无门限毛刺或纹波现象,且有效屏蔽附件设备所带来的电源噪声。雷达模块需要良好的接地,由于其他电路带来的噪声,也可能引起雷达模块性能下降甚至工作异常;最常见的是导致探测距离变近或误报率增加。为了保证模块内部VCO 电路的正常工作,对本模块供电要求为+5 V 左右 供电,电压纹波≤100 mV。同时外部电源必须提供足够的电流输出能力和瞬态响应能力。
远离电器出风口,如电风扇、空调、暖风机等,防止损伤内部芯片,避免安装于潮湿环境,如加湿器、卫浴间等。
雷达属于电磁波探测传感器,活动的非生命体会导致误报。金属,液体的运动,会导致误判。通常,电风扇,贴近雷达的宠物,金属窗帘的晃动都会引起误判。雷达需要在安装角度以及安装场所上进行规划。雷达电磁波会穿透人体的衣物,窗帘,薄木板,玻璃。需要根据应用,决定雷达的安装角度以及性能。雷达判断人体存在,不适合直接面对空调。空调内部电机会导致雷达误判。需要雷达产品不直接面对空调。或者同空调同一方向。
雷达天线罩用于保护雷达天线,使其免受雨,阳光,风等外部环境影响。但其对雷达天线有如下影响:天线罩带来的介质损耗和反射损耗会使得雷达的有效功率变小;导致天线波束发生畸变,使得雷达作用区域发生变化;外壳对电磁波的反射使得雷达收发天线隔离度变差,并有可能导致接收机饱和;电磁波透过雷达天线罩时相位发生变化,影响角度的测量。因此对雷达天线罩的设计以减少外壳影响提高雷达性能是十分有必要的。
设计要求:
Ø 在选择雷达天线罩的材料时,在保证坚固程度,低成本的前提下,应选择介电常数和损耗角正切越小的材料,以减小雷达天线罩对雷达性能的影响。常用材料介电常数,耗散因数如下表:
|
材料 |
介电常数(εr) |
耗散因数(tan δ) |
|
聚碳酸酯 |
2.9 |
0.012 |
|
ABS |
2.0-3.5 |
0.0050-0.019 |
|
PEEK |
3.2 |
0.0048 |
|
PTFE(Teflon®) |
2 |
<0.0002 |
|
Plexiglass® |
2.6 |
0.009 |
|
玻璃 |
5.75 |
0.003 |
|
陶瓷 |
9.8 |
0.0005 |
|
PE |
2.3 |
0.0003 |
|
PBT |
2.9-4.0 |
0.002 |
Ø 要求雷达天线罩表面光滑,厚度均匀一致
Ø 雷达天线罩厚度设计要求
T=N∙c2fεrN=1,2,3…
T:雷达天线罩厚度
c:光速, m/s;
f:中心频率
εr:材料介电常数,DK
Ø 雷达天线离外壳内表面高度设计要求
d=N∙c2fN=1,2,3…
c:光速,3×108 m/s;
f: 中心频率
f=60 GHz
c/2f=2.5 mm
我司认为,在出版时尽量做到文档描述的准确无误。考虑到产品的技术复杂性及工作环境的差异性,但仍难以排除个别不准确或不完备之描述,故本文档仅作用户参考之用。我司保留在不通知用户的情况下对产品做出更改的权利,我司不做任何法律意义上的承诺和担保。鼓励客户对产品和支持工具最近的更新提出意见。












沪ICP备2022023896号-1
![]() 沪公网安备31011202020776号
沪公网安备31011202020776号
Copyright: 2016 State Key Laboratory of Surface Physics
