
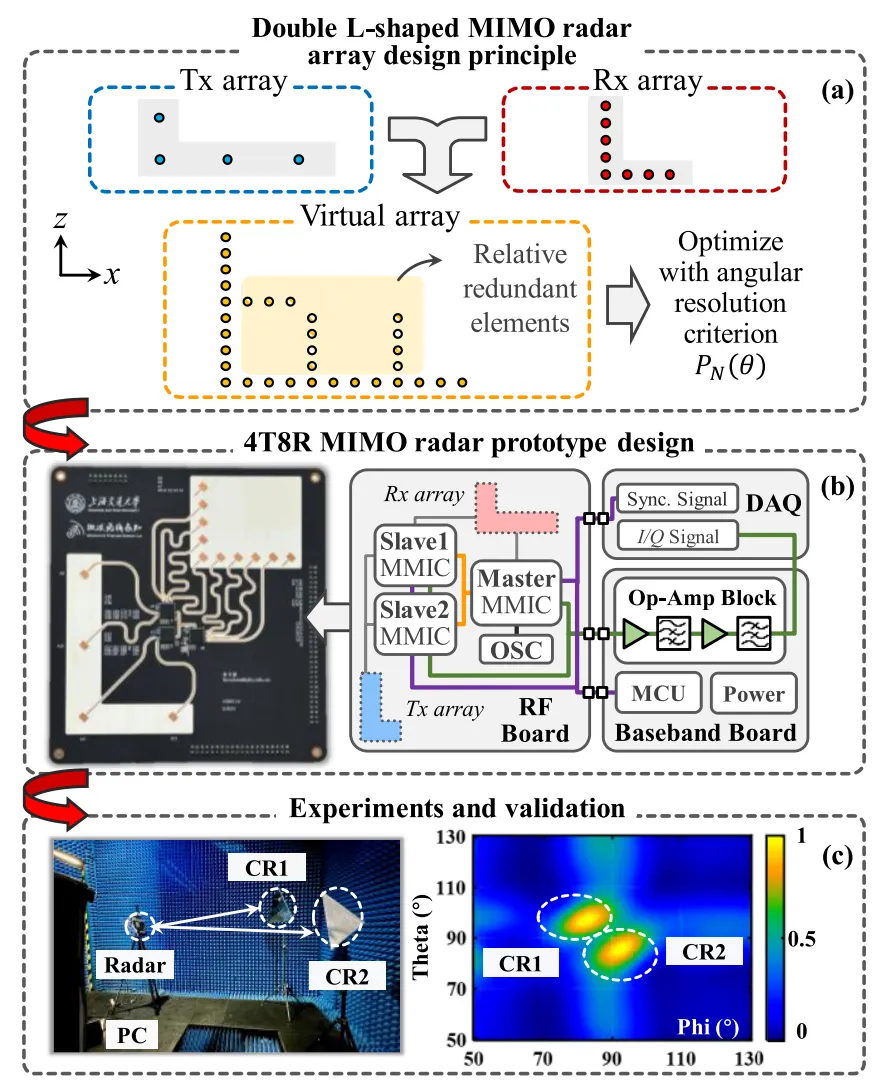
文章核心创新:本文提出双L型MIMO雷达阵列设计方法,同时采用相同L型布局的发射和接收阵列,构成最大化L型虚拟孔径的4-D雷达系统,通过非均匀阵列配置最大化虚拟孔径增益的替代方法。引入角分辨率判别因子(ARD)理论评估不同阵列配置的角度性能,定义了绝对冗余单元和相对冗余单元概念。研制4T8R原型机,在theta和phi平面分别实现8.4°和6.1°的理论角分辨率,实测达到9.2°和7.1°,在室内多目标追踪中轨迹跟踪RMSE仅23.5 cm,生命体征监测准确提取心率64.5和81.2 bpm。
文章基本信息
英文标题: A Double L-Shaped 4-D MIMO Radar Array With Optimal Subspace-Based Angular Resolution
发表期刊: IEEE Transactions on Microwave Theory and Techniques
作者: Yuchen Li (Member, IEEE), Jiayu Zhang (Graduate Student Member, IEEE), Changzhan Gu (Senior Member, IEEE)
作者单位: State Key Laboratory of Radio Frequency Heterogeneous Integration, Shanghai Jiao Tong University, Shanghai 200240, China
通讯作者: Changzhan Gu (changzhan@sjtu.edu.cn)
研究方向: 4-D毫米波雷达、MIMO雷达天线阵列设计、子空间测角算法(DOA估计)、室内目标追踪与生命体征监测
文章引用: Y. Li, J. Zhang, and C. Gu, "A Double L-Shaped 4-D MIMO Radar Array With Optimal Subspace-Based Angular Resolution," IEEE Trans. Microw. Theory Techn., 2025.
DOI: 10.1109/TMTT.2025.3649652
论文评价和科普
4-D毫米波雷达作为新兴技术,因其高精度、高敏感性、对环境条件的免疫性以及无隐私风险等特点,在自动驾驶、舱内乘员监测、生命体征健康监测、室内人体定位等领域得到了广泛应用。与传统雷达系统不同,4-D毫米波雷达需要精确的3-D空间坐标信息和连续的运动轨迹跟踪能力。
然而,在自动驾驶和手势识别等应用中,涉及多个近距离目标的场景对MIMO雷达的角分辨率和到达方向(DOA)估计提出了重大挑战。虽然增加发射和接收单元数量是提高雷达角分辨率的直观方法,但大规模阵列会显著增加系统复杂性和成本。因此,研究者转向在固定发射/接收单元数量下,通过非均匀阵列配置最大化虚拟孔径增益的替代方法。
本文针对这一问题,提出了双L型MIMO雷达阵列设计方法。通过建立角分辨率判别因子(ARD)理论模型,系统分析了不同阵列配置对子空间算法角度估计性能的影响,并定义了冗余单元的概念。研究表明,L型结构在孔径利用和噪声鲁棒性之间提供了良好平衡,当发射和接收阵列都采用相同的L型方向时,虚拟阵列可获得最大的L型孔径,确保子空间估计方法的最优角分辨率。
现有研究问题与本文解决方案
| 对比维度 | 传统大规模阵列 | 稀疏阵列方法 | 相控阵结合稀疏阵列 | 本文双L型方法 |
| 系统复杂度 | 高(36Tx+48Rx) | 中等 | 高 | 低(4T8R) |
| 成本 | 高昂,限制推广 | 中等 | 高 | 低廉,易于部署 |
| 角分辨率 | 优秀但代价大 | 良好 | 优秀 | 在theta/phi平面达8.4°/6.1° |
| 计算复杂度 | 极高 | 矩阵运算复杂 | 高 | 支持DFT加速,低复杂度 |
| 优化完整性 | 针对单一指标 | 分离优化Tx/Rx | 分离优化 | 统一考虑虚拟阵列最优化 |
| 子空间算法适配 | 未专门考虑 | 未专门考虑 | 未专门考虑 | 专门针对子空间方法优化 |
研究内容简介
图[1]: 双L型MIMO雷达阵列设计总体框架:(a) 基于虚拟阵列与子空间方法推导角分辨率判据;(b) 基于所提方法设计4T8R MIMO雷达原型;(c) 对所提方法与原型进行实验验证。
图[2]: 经典1-D均匀线性阵列(ULA)接收来自不同入射角信号的DOA估计示意图。
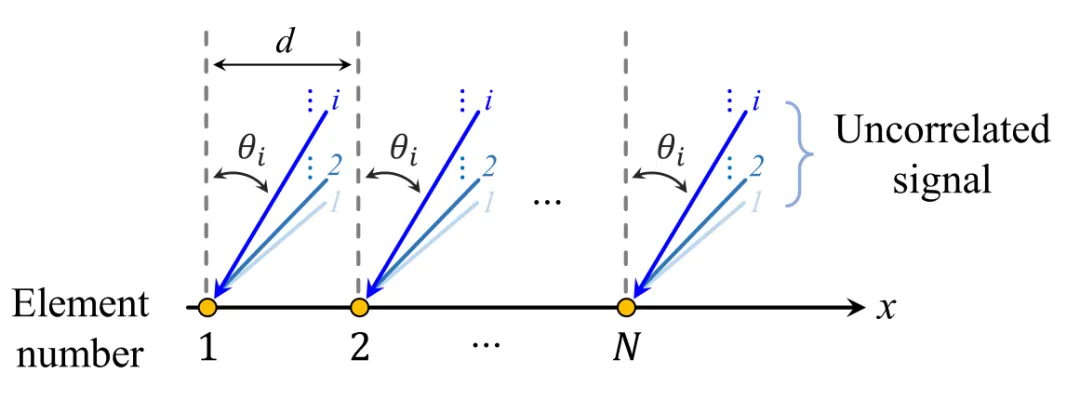
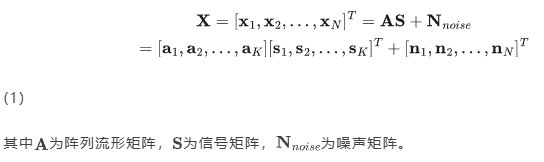
对于具有N个单元的1-D均匀线性阵列(ULA),接收K个不相关信号时,阵列接收信号的总信号表达式为:
2. 基于子空间方法的ARD推导
图[3]: 1-D阵列检测中的冗余单元示意图。
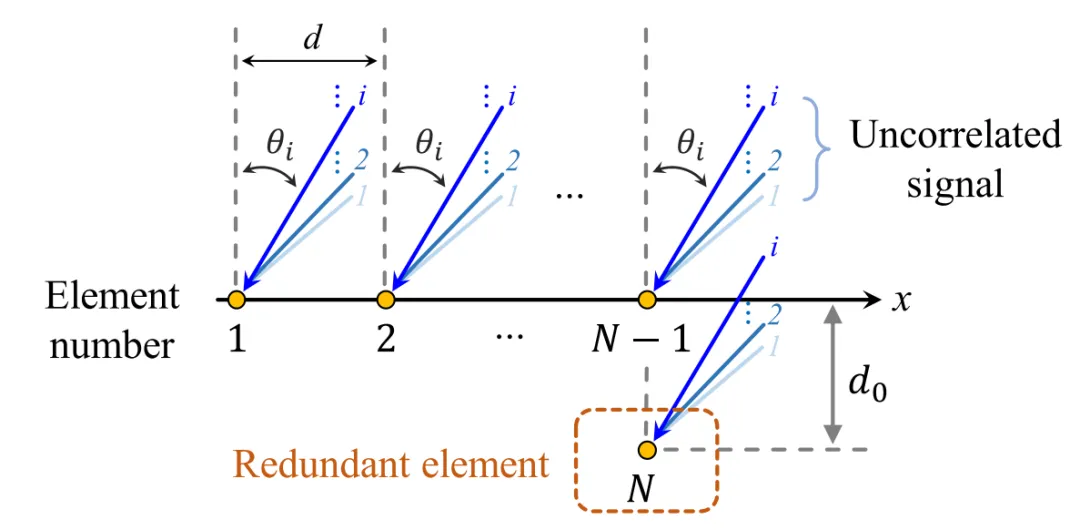
基于子空间DOA算法的基础理论,提出针对N个单元和K个不相关信号的1-D ULA的角分辨率判别因子(ARD):
通过推导分析,1-D阵列的角分辨率与阵列单元数量N的关系为:
3. 2-D平面阵列设计优化
图[5]: 2-D平面阵列中发射阵列、接收阵列与虚拟阵列的排列示意图。
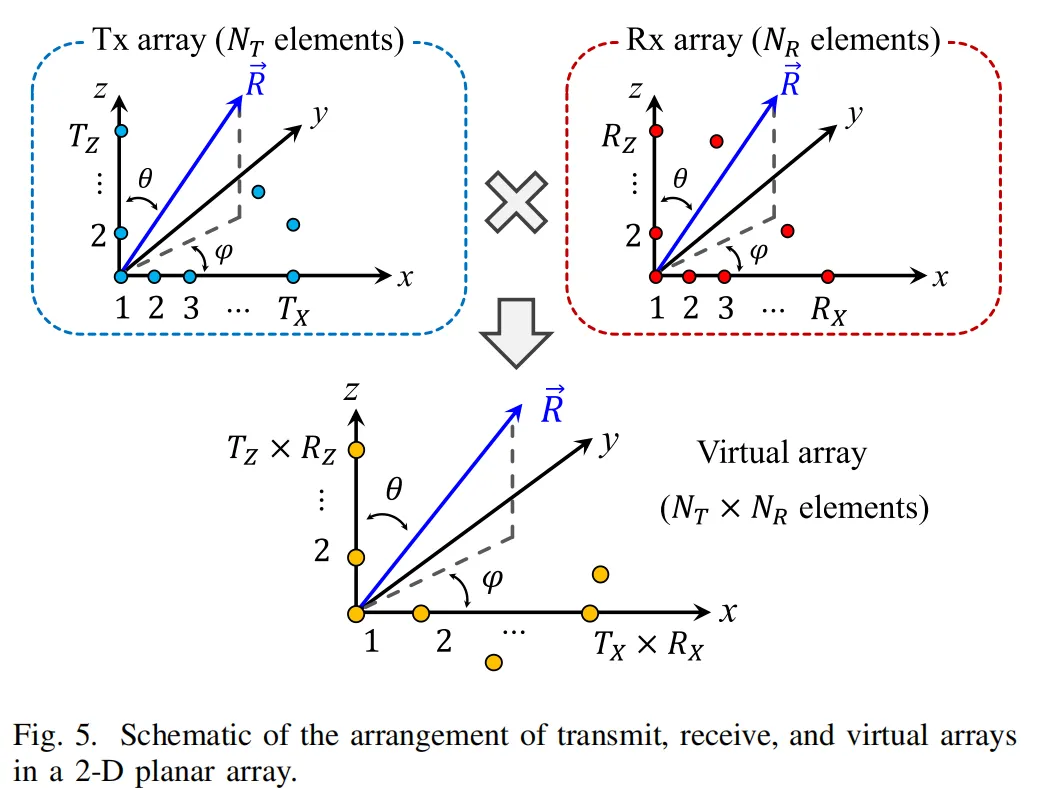
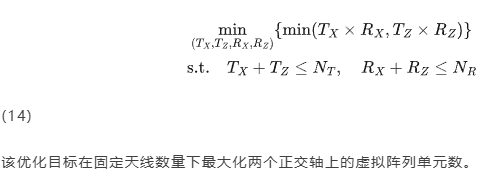
对于MIMO雷达,虚拟阵列由发射和接收阵列的组合形成。为了优化沿两个轴的ULA单元数量,数学优化问题表述为:
4. 冗余单元定义与分析
图[6]: 绝对冗余单元与相对冗余单元的概念示意图。
图[7]: 不同相对冗余单元对角度估计的影响。
定义了相对冗余单元和绝对冗余单元:相对冗余单元有助于一个角度估计而不改善另一方向的孔径,而绝对冗余单元对任何方向都不提供孔径增强。
图[8]: 总单元数Ntotal=9且NX=NY=5的25种阵列配置示意(包含按行与按列两种编号方式)。
5. 虚拟阵列设计规则
图[10]: 25种阵列配置的模糊度函数(AF)仿真结果:每个子图标注阵列索引及基于3 dB阈值的感兴趣区域(AOI,单位:平方度)。
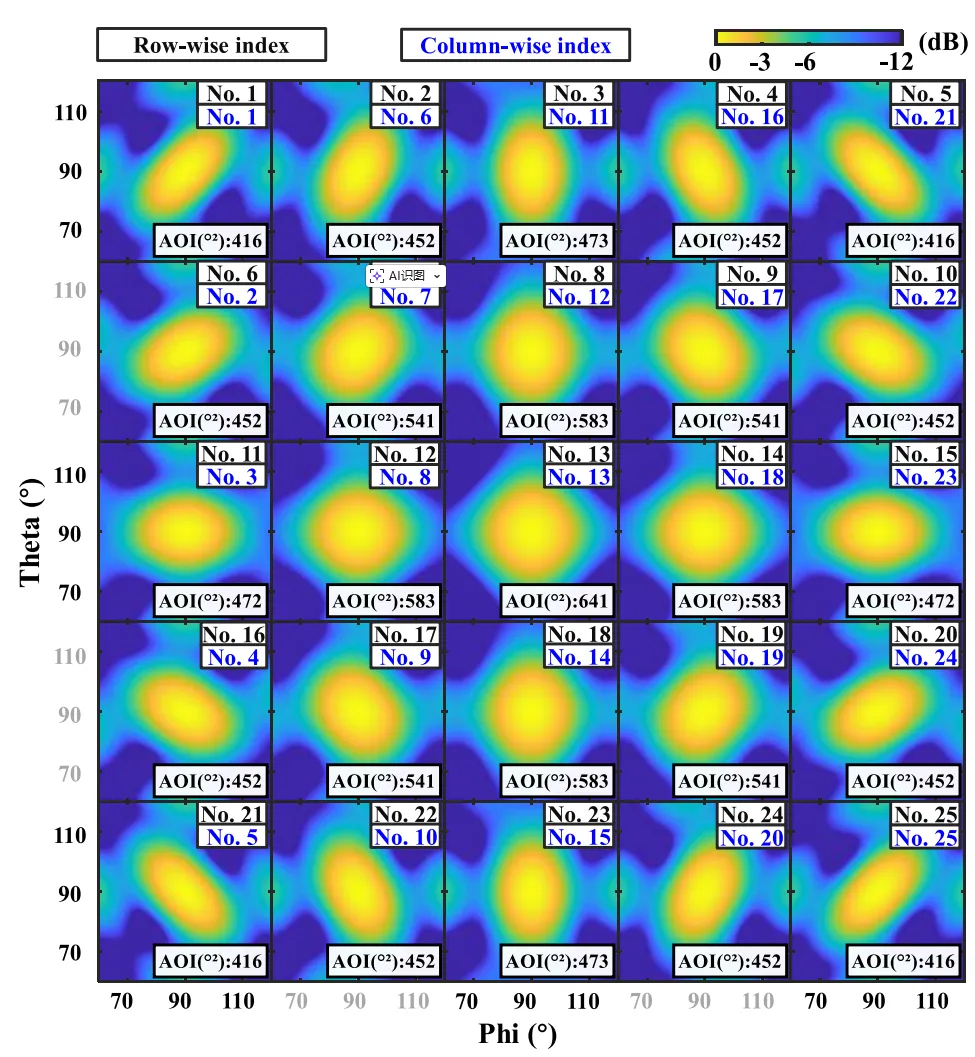
模糊度函数(AF)的表达式为:
图[11]: 具有最优L型孔径的虚拟阵列设计规则示意图。
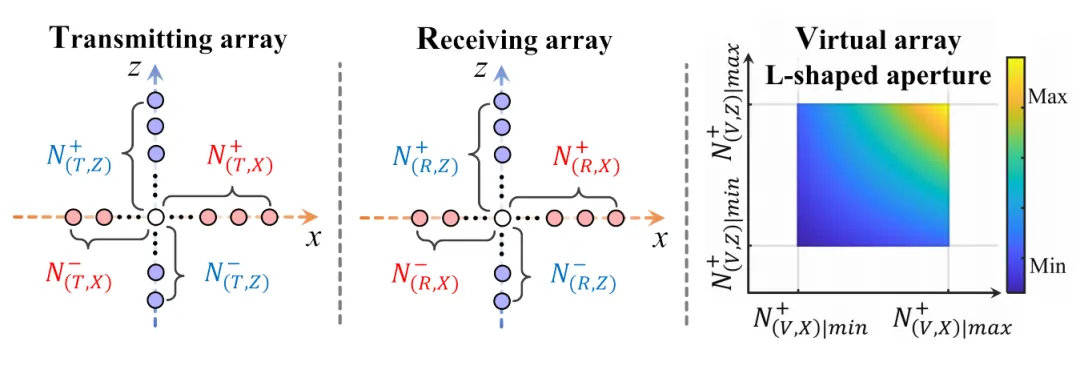
虚拟阵列在x轴和z轴上最大化L型孔径的单元数计算公式:
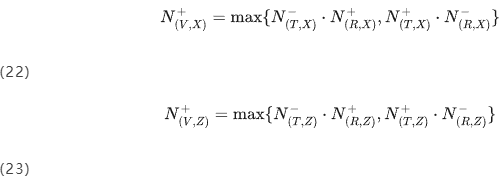
确定虚拟阵列获得最大L型孔径的设计规则。
实验结果分析
1. 4T8R MIMO阵列设计验证
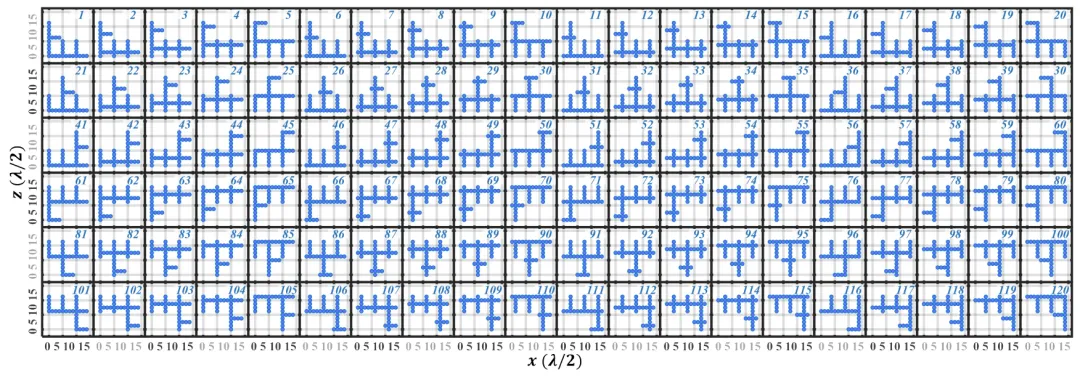
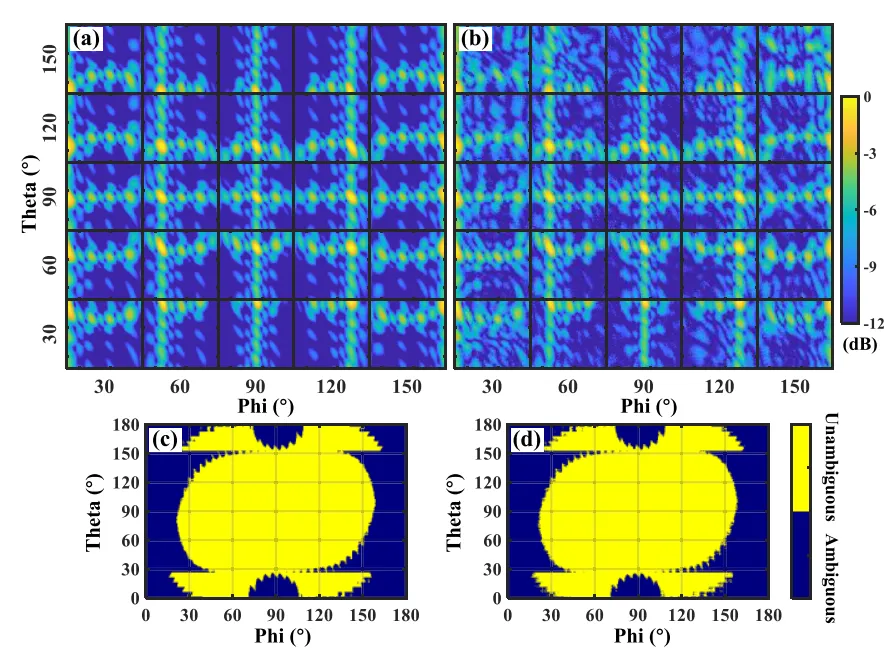
图[12]: 满足4T8R MIMO阵列条件的120种虚拟阵列配置示意图。
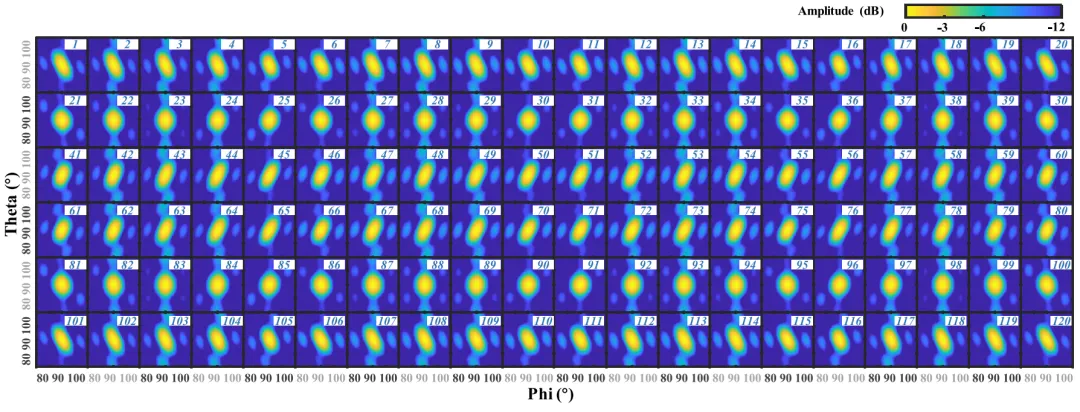
图[13]: 120种4T8R MIMO阵列配置的模糊度函数(AF)仿真结果。
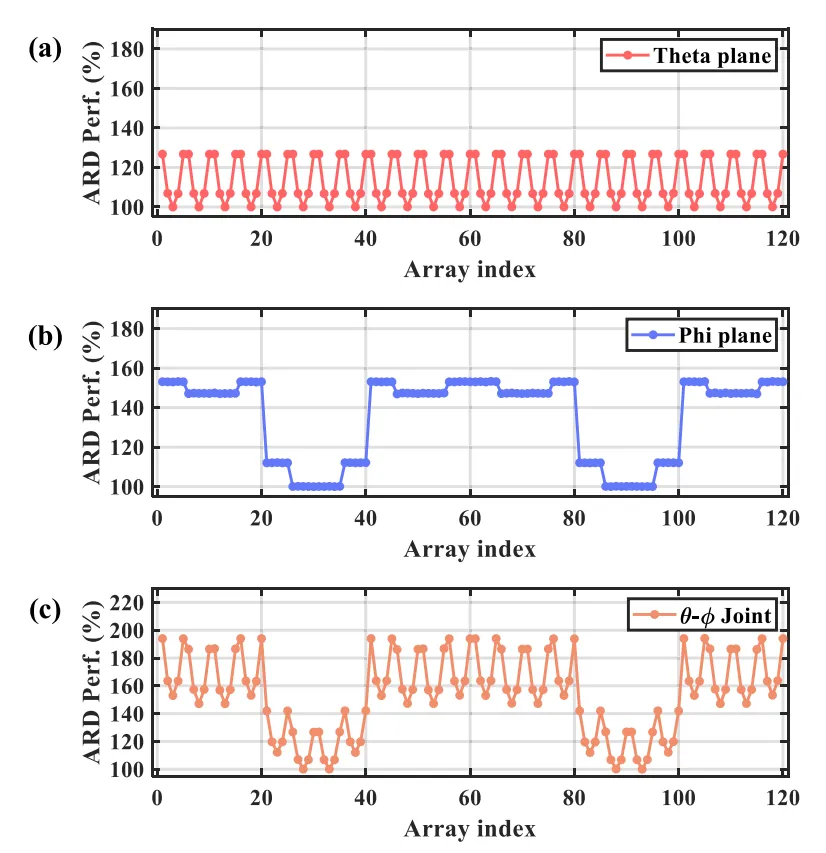
图[14]: 120种4T8R MIMO阵列配置的角分辨率性能。

2. 4T8R雷达原型机设计
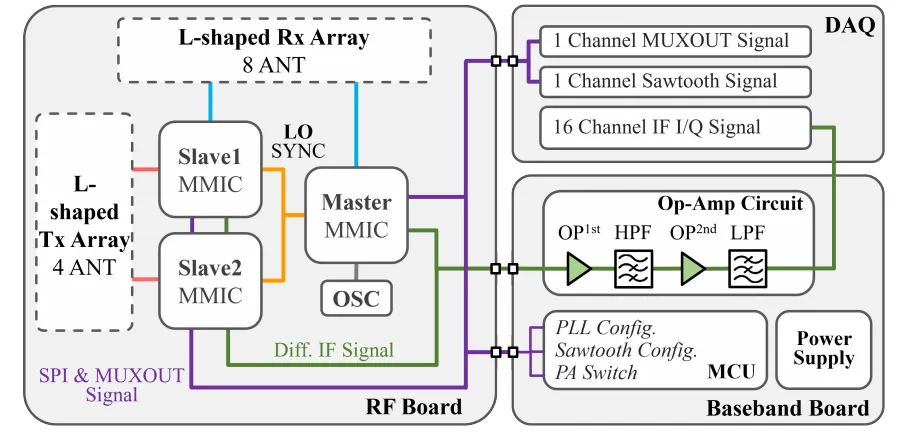
图[15]: 4T8R MIMO雷达原型机框图。
表[I]: MIMO雷达原型机所用主要器件。
图[16]: 4T8R雷达原型机的射频设计细节。
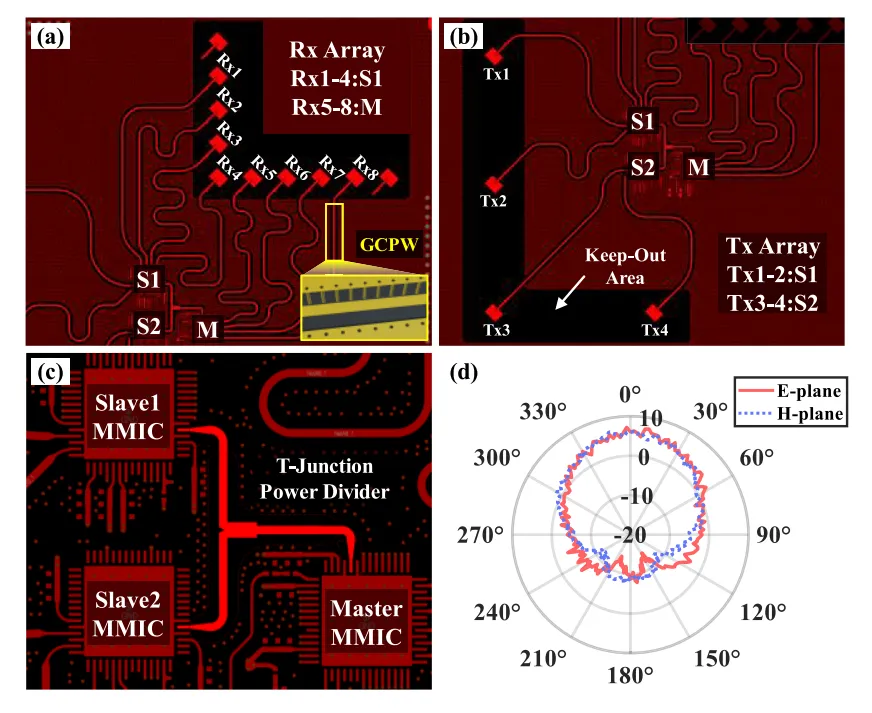
图[17]: 定制双L型4T8R MIMO雷达原型机实物照片。
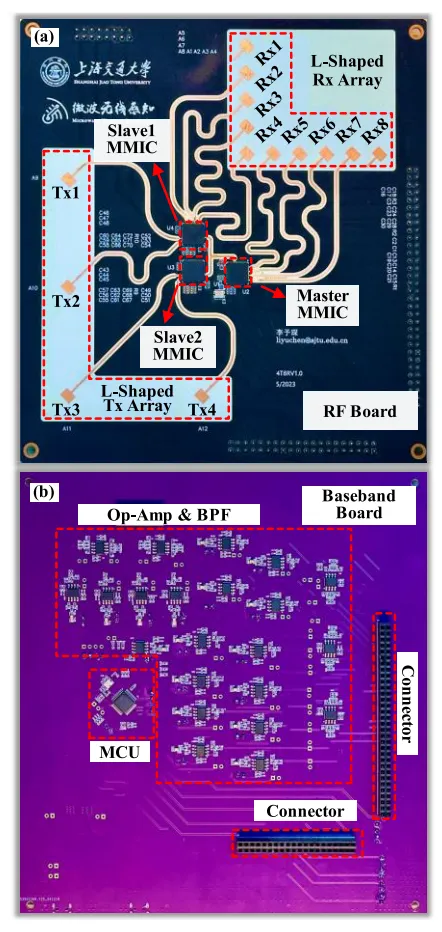
4T8R MIMO雷达原型机采用三个级联的2T4R雷达MMIC,实现总共4个发射通道和8个接收通道。发射和接收阵列都使用相同的贴片天线单元,旋转180°以保持一致的极化。贴片天线单元的峰值增益为6.45 dBi,E面和H面的3 dB波束宽度分别约为75°和80°。
3. 校准与测试
图[18]: 校准实验搭建实物照片。
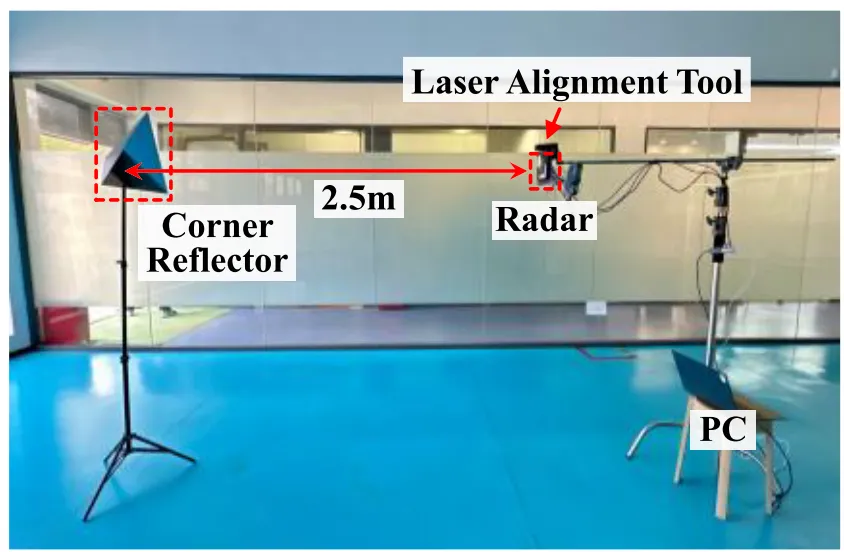
校准程序在开放环境中进行,雷达原型机平行安装在地面支架上,大型角反射器(CR)沿视轴方向放置在2.5米处。以第一个虚拟通道(TX1-RX1)为参考,对所有通道的信号进行幅度和相位归一化。
4. 角分辨率性能验证
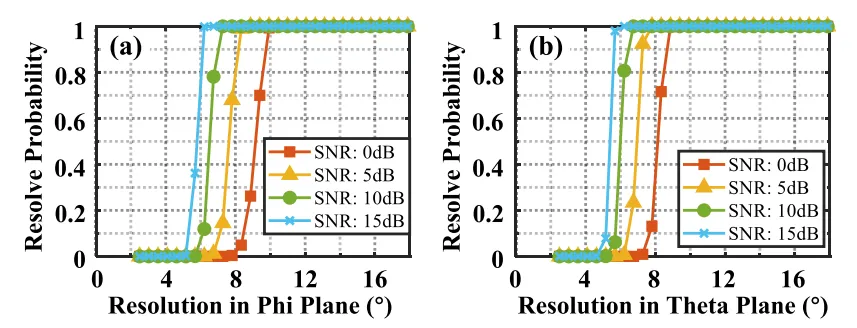
图[20]: 不同SNR条件下的双目标角分辨率性能。
图[21]: 两个角反射器(CR)条件下的角分辨率实验与结果。
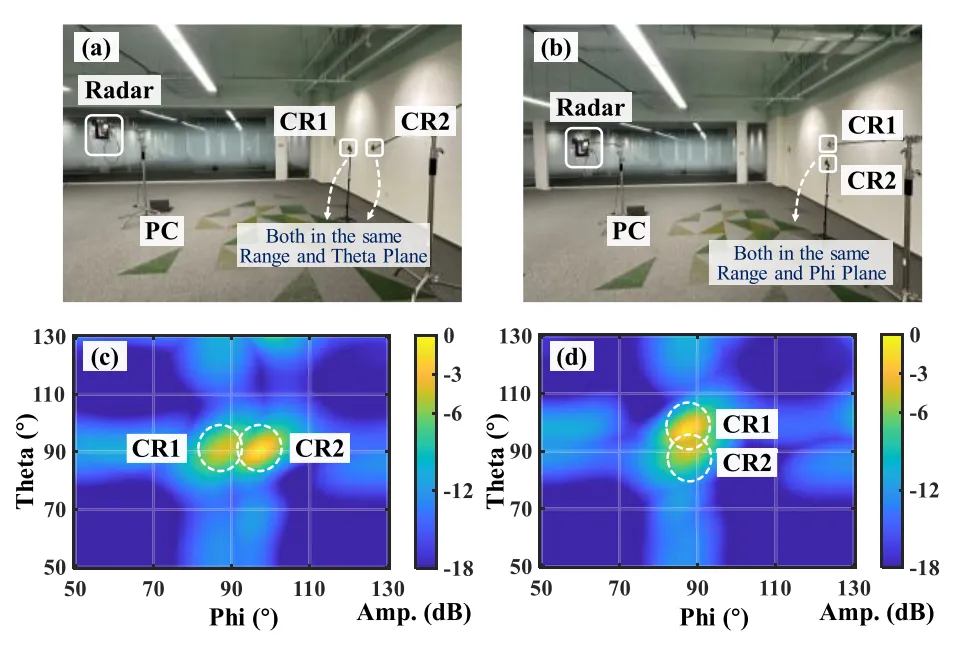
基于子空间仿真的双L型MIMO阵列理论角分辨率为theta平面8.4°和phi平面6.1°。角分辨率实验采用两个角反射器在相同距离但略有偏移的办公室环境中进行。实测结果显示theta和phi平面的最小可分辨角分别为9.2°和7.1°,与仿真结果高度吻合。
表[II]: 代表性MIMO阵列设计工作与本文工作的对比。
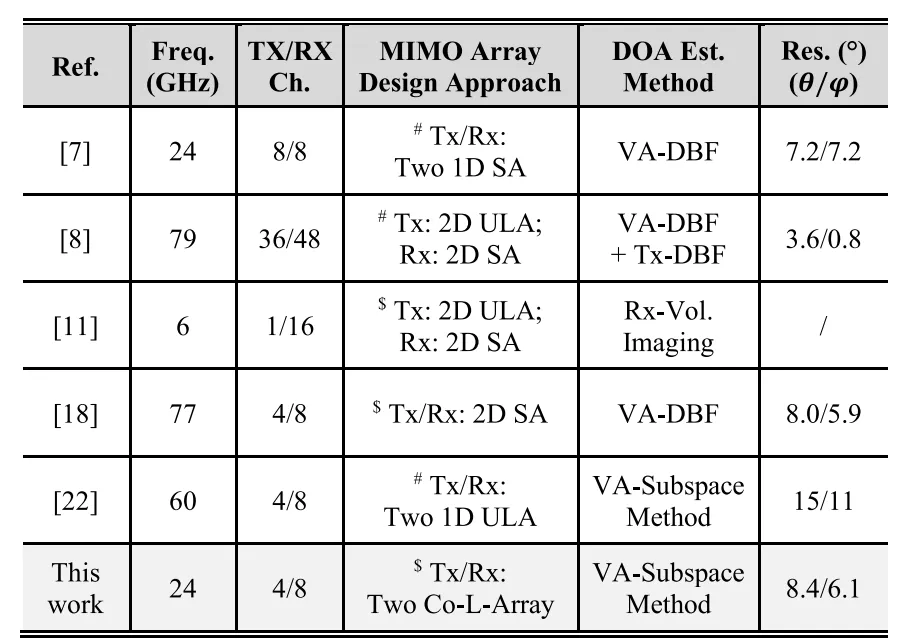
与现有技术对比表明,在MIMO阵列单元数量相当的情况下,双L型阵列设计实现了更高的角分辨率。规则单元排列便于在角度估计算法中应用基于DFT的加速器,显著提升了实际应用中的效率。
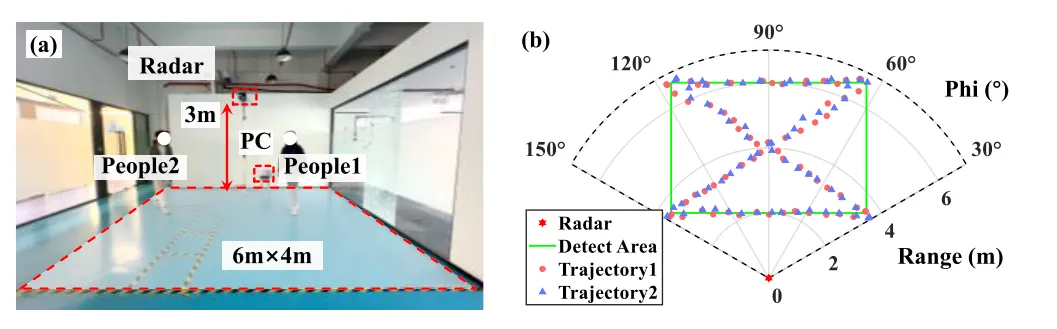
室内多目标轨迹跟踪实验中,两名受试者沿预定路径行走,包含轨迹交叉、停顿和位置交换。进行了5次实验,每次持续3分钟。与相机获得的真实轨迹对比,所有测试中的平均轨迹跟踪RMSE为23.5 cm,展现了雷达在室内双人交叉场景中的有效性能。
图[23]: 室内双人生命体征监测实验。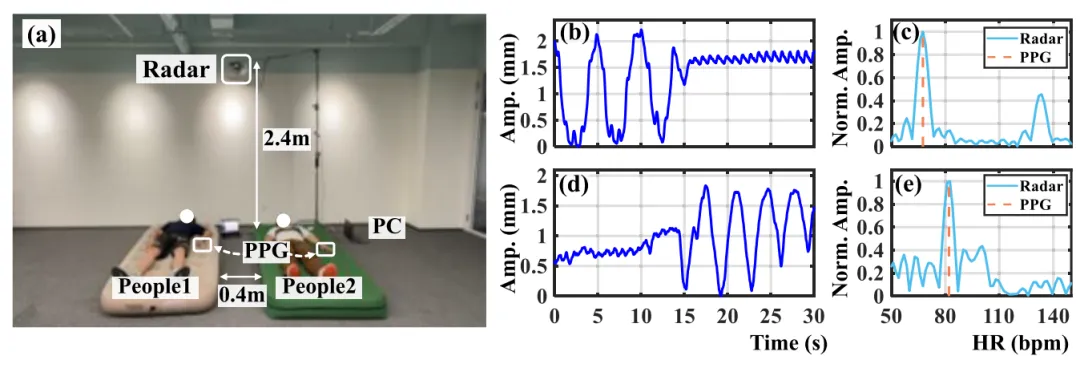
双受试者生命体征监测实验中,雷达原型机安装在距离地面2.4米高度,监测相距0.4米的两名受试者。通过数字波束形成和基于子空间的方法,系统有效分离了两个受试者的信号,捕获胸部位移和心脏活动。光谱分析得出的心率为64.5和81.2 bpm,与PPG参考数据高度一致。
L型阵列相比于中央十字形阵列在2-D角度分离度上实现了54%的提升,相比于非L型阵列平均提升约21%,验证了L型虚拟阵列在联合theta-phi估计中的优势。
论文评价
本文提出了一种基于子空间技术的高角分辨率双L型MIMO雷达阵列设计方法,其中发射和接收阵列都配置为相同的L形。通过建立2-D阵列的角度估计模型,引入了ARD来量化不同阵列配置在角度估计中的细微性能差异。研究引入了2-D阵列中绝对冗余单元和相对冗余单元的定义,并分析了它们对阵列角分辨率性能的影响。双L型设计确保虚拟阵列仅包含相对冗余单元,从而在theta和phi平面都实现最优的角分辨率影响。
开发了采用双L阵列设计的4T8R MIMO雷达原型机,实验结果表明4T8R雷达原型机在theta和phi平面分别实现了8.4°和6.1°的角分辨率。室内多目标跟踪实验突显了雷达在室内定位应用中的潜力。双受试者生命体征监测实验进一步确认了原型机在真实多人场景中的能力,显示了其在医疗保健和人体监测应用中的前景。
所提出的阵列设计方法简单高效,虚拟单元的规则排列显著改善了DOA估计性能。这项工作为未来大孔径、高集成度MIMO雷达系统的阵列设计和角度检测奠定了坚实基础。
注:本文全文转载自 “无线谷小当家”微信公众号文章《雷达研究必看!上海交大双L型4-D雷达:用4T8R实现9°级角分辨,子空间DOA性能最优解,发文TMTT!【当家带你读新文】》
可点击链接直达原文出处:阅读小当家原文












沪ICP备2022023896号-1
![]() 沪公网安备31011202020776号
沪公网安备31011202020776号
Copyright: 2016 State Key Laboratory of Surface Physics
